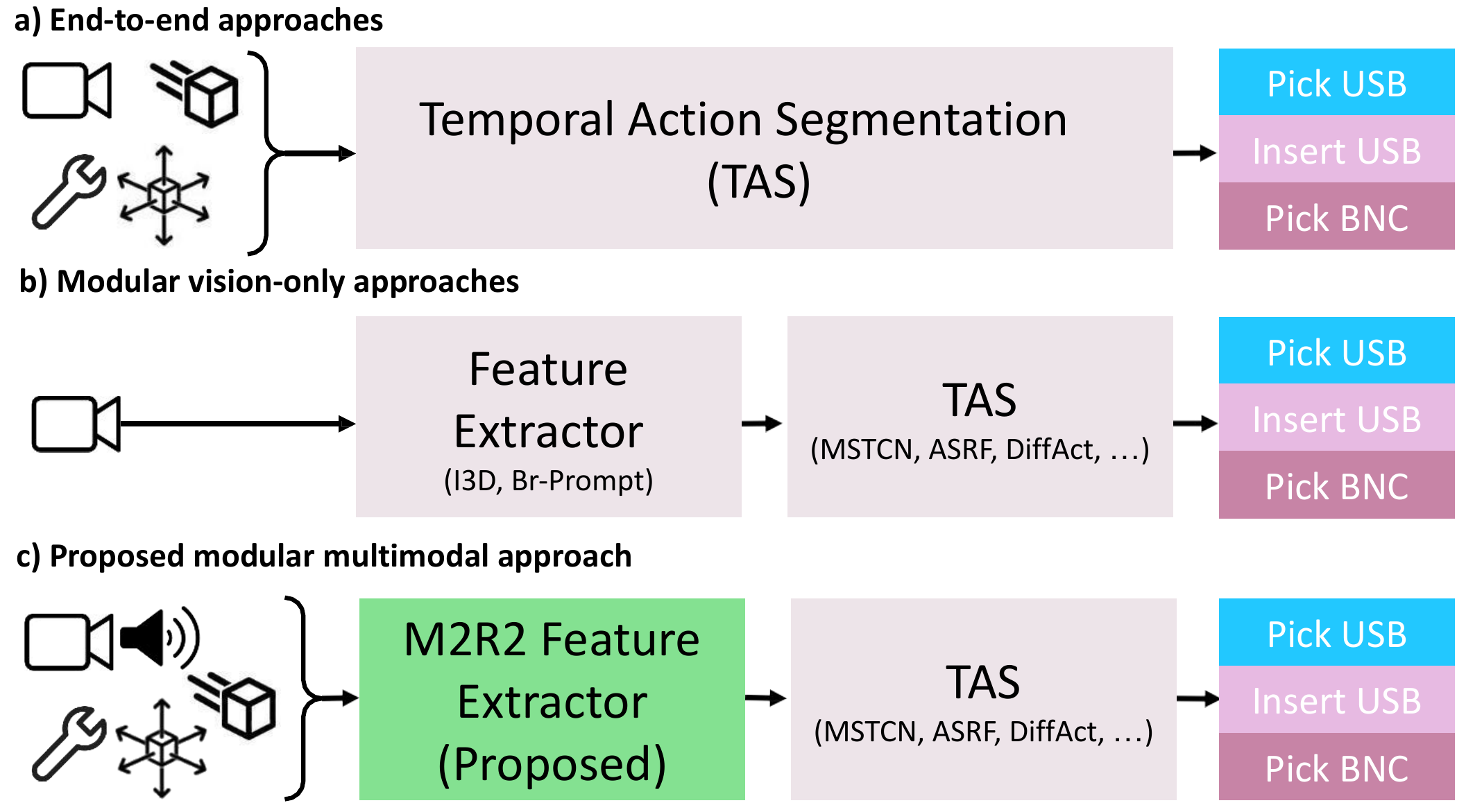
- Jun 2026: M2R2 has been accepted to ICRA 2026!
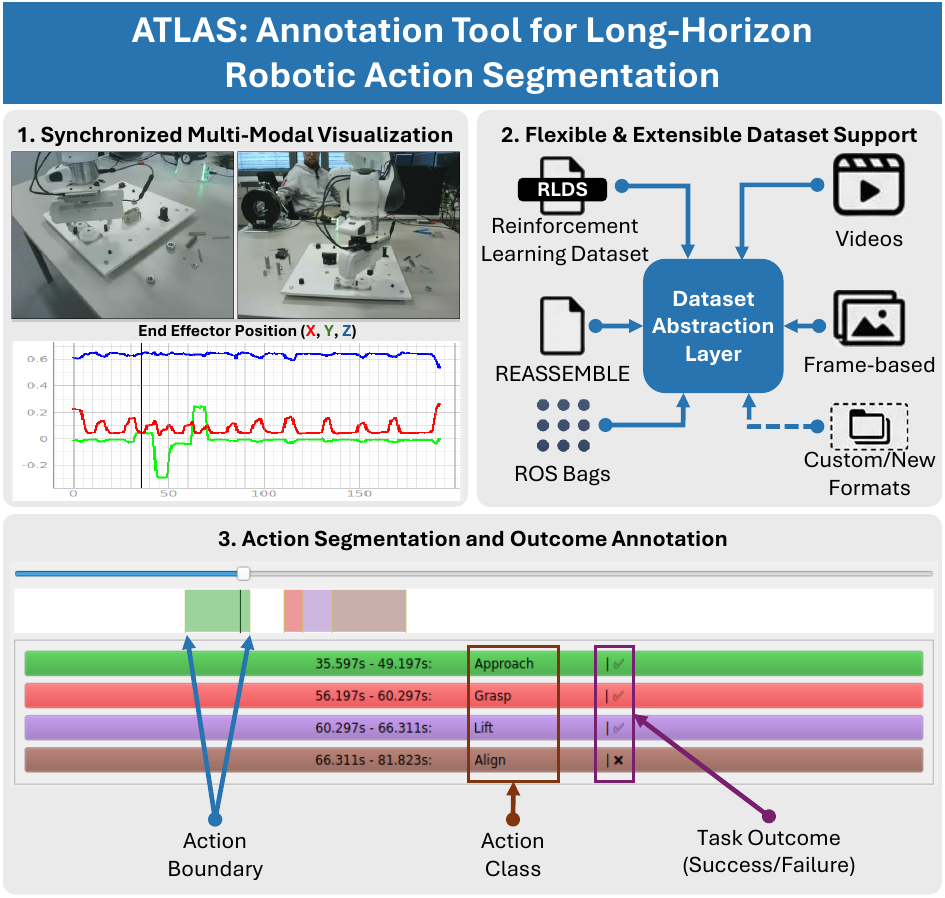
- Jun 2026: ATLAS has been accepted to ARSO 2026!
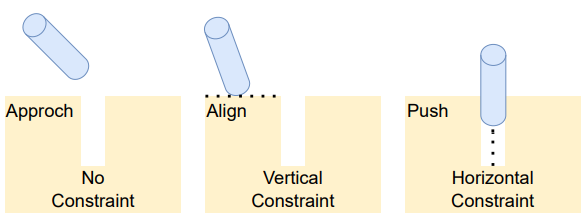
- Nov 2025: Our “Constraint-Informed Temporal Action Segmentation” paper was presented at ICCAS 2025.
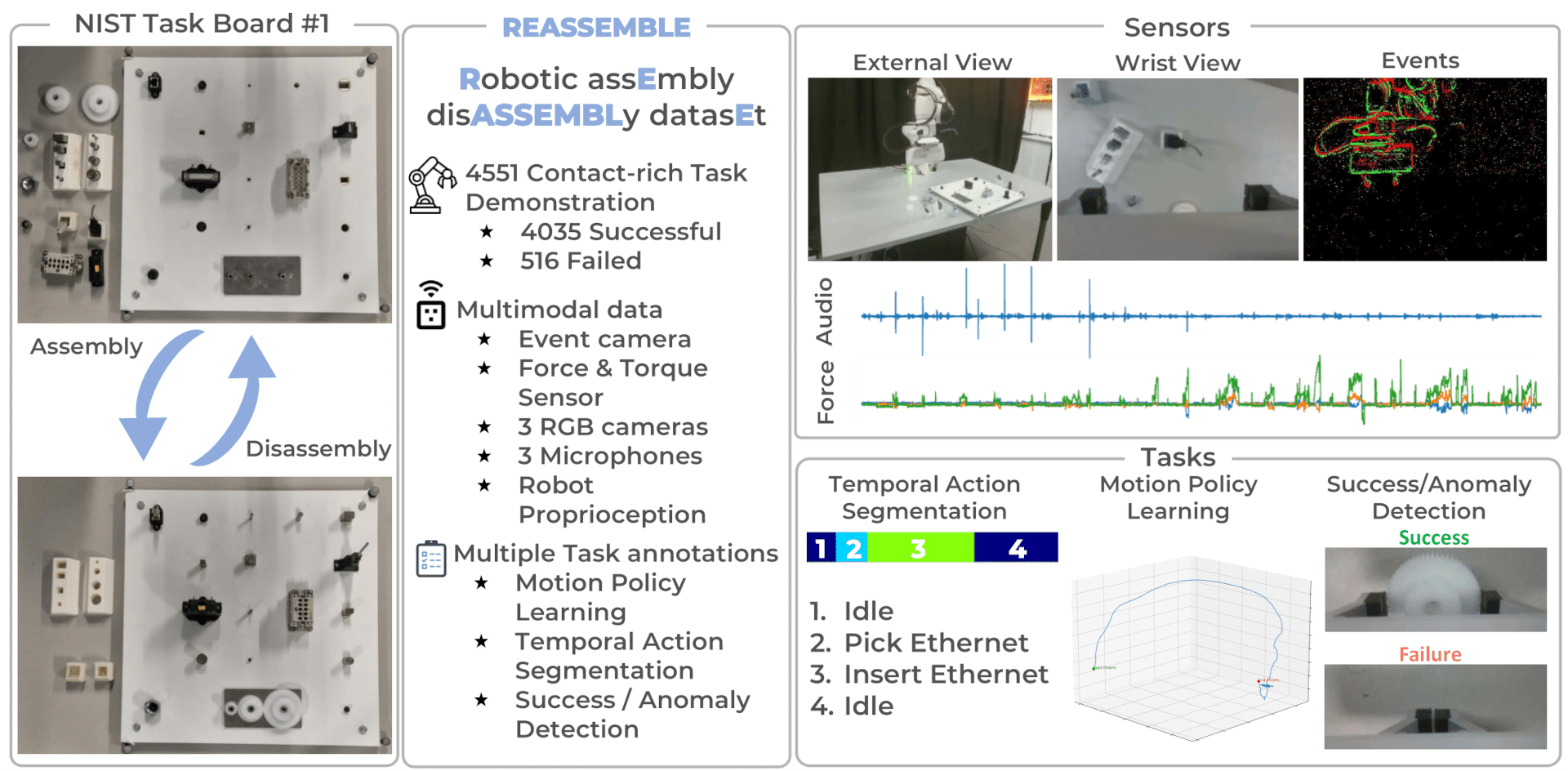
- Feb 2025: We are releasing the REASSEMBLE dataset.
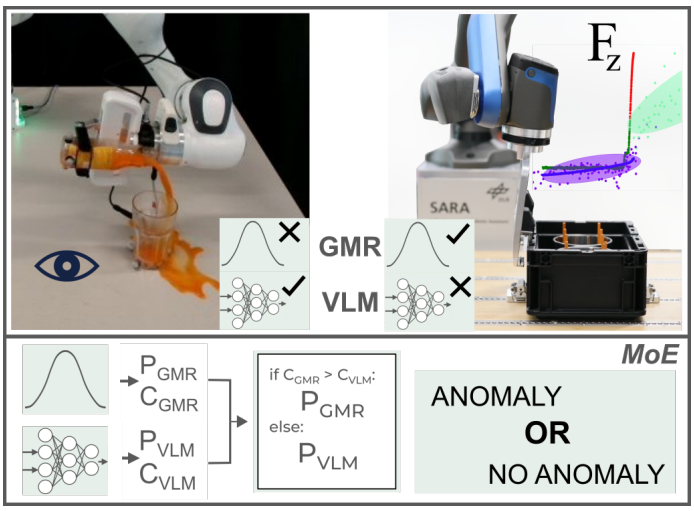
- Oct 2025: Our “Multimodal Anomaly Detection with a Mixture-of-Experts” paper was accepted at IROS 2025.
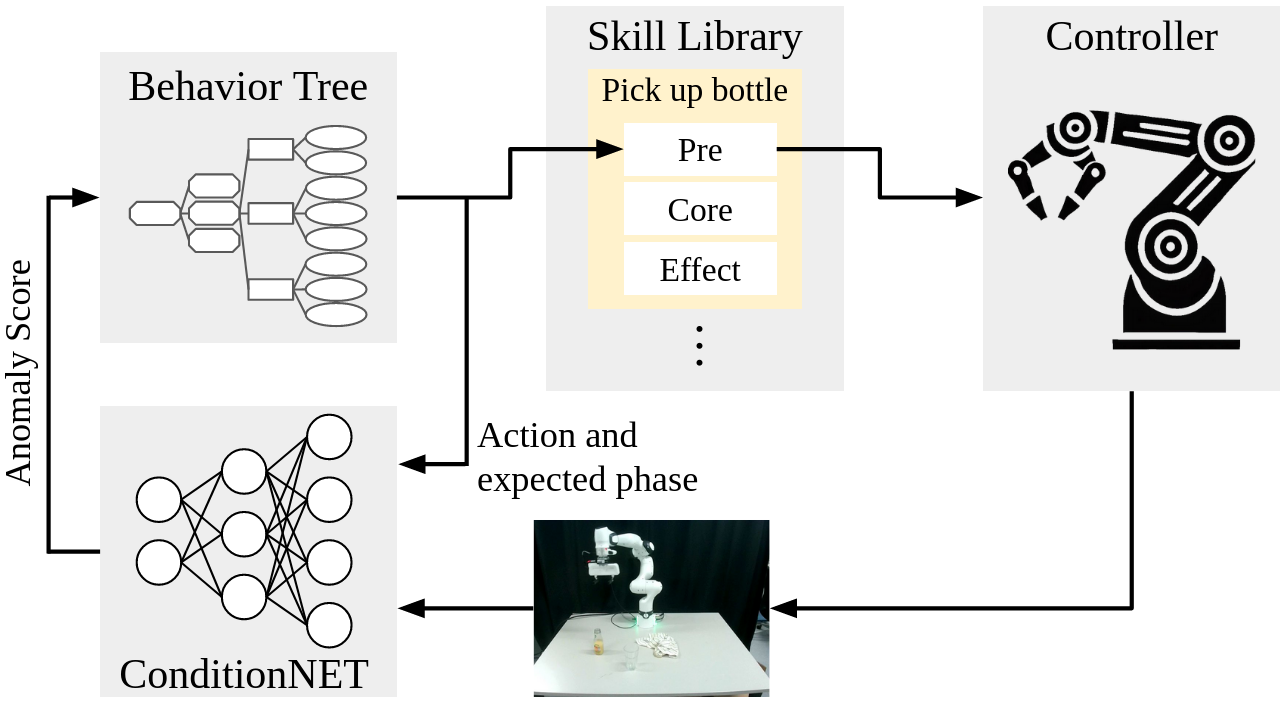
- Feb 2025: Our ConditionNET paper got accepted at Robotics and Automation Letters!
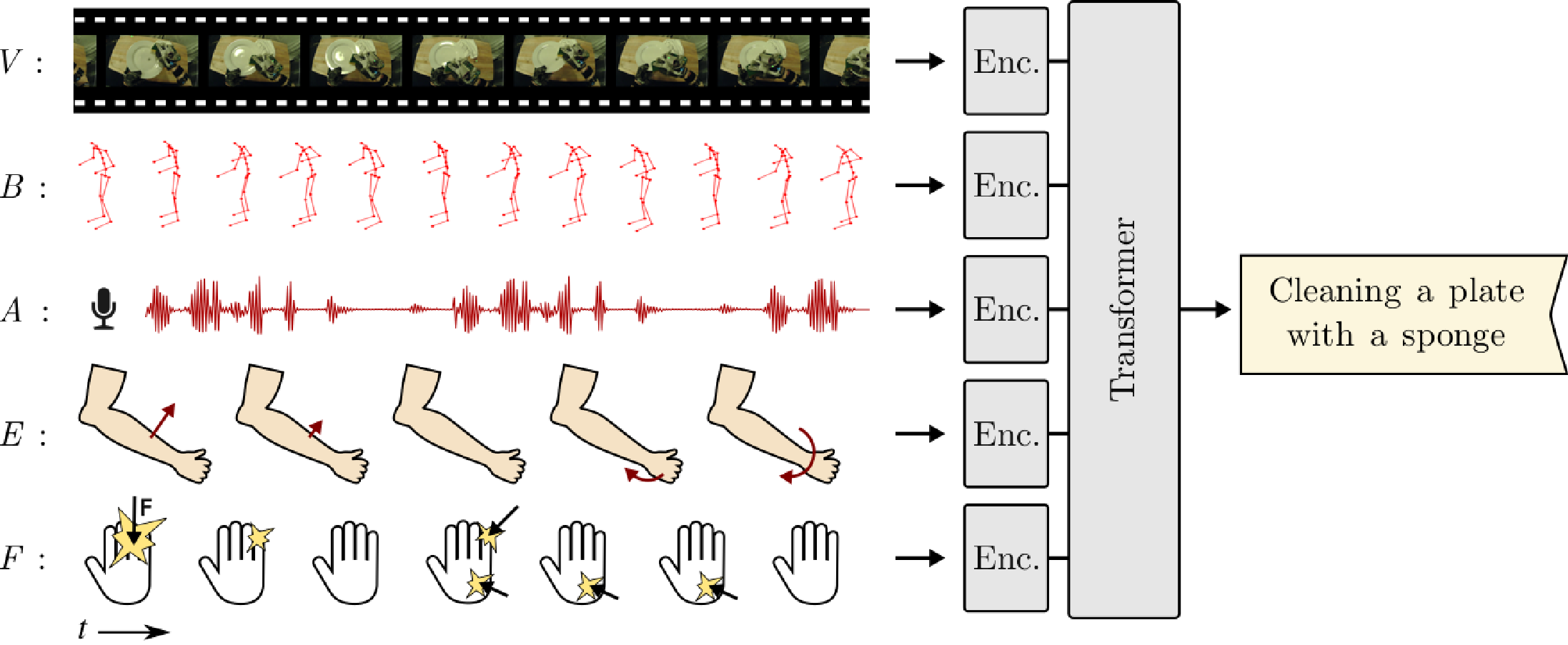
- Dec 2024: Our “Multimodal Transformer Models for Human Action Classification” paper at RiTA has won the reward of the Best Intelligence Paper.
- Sep 2024: Our “Multimodal Transformer Models for Human Action Classification” paper was accepted at RiTA.
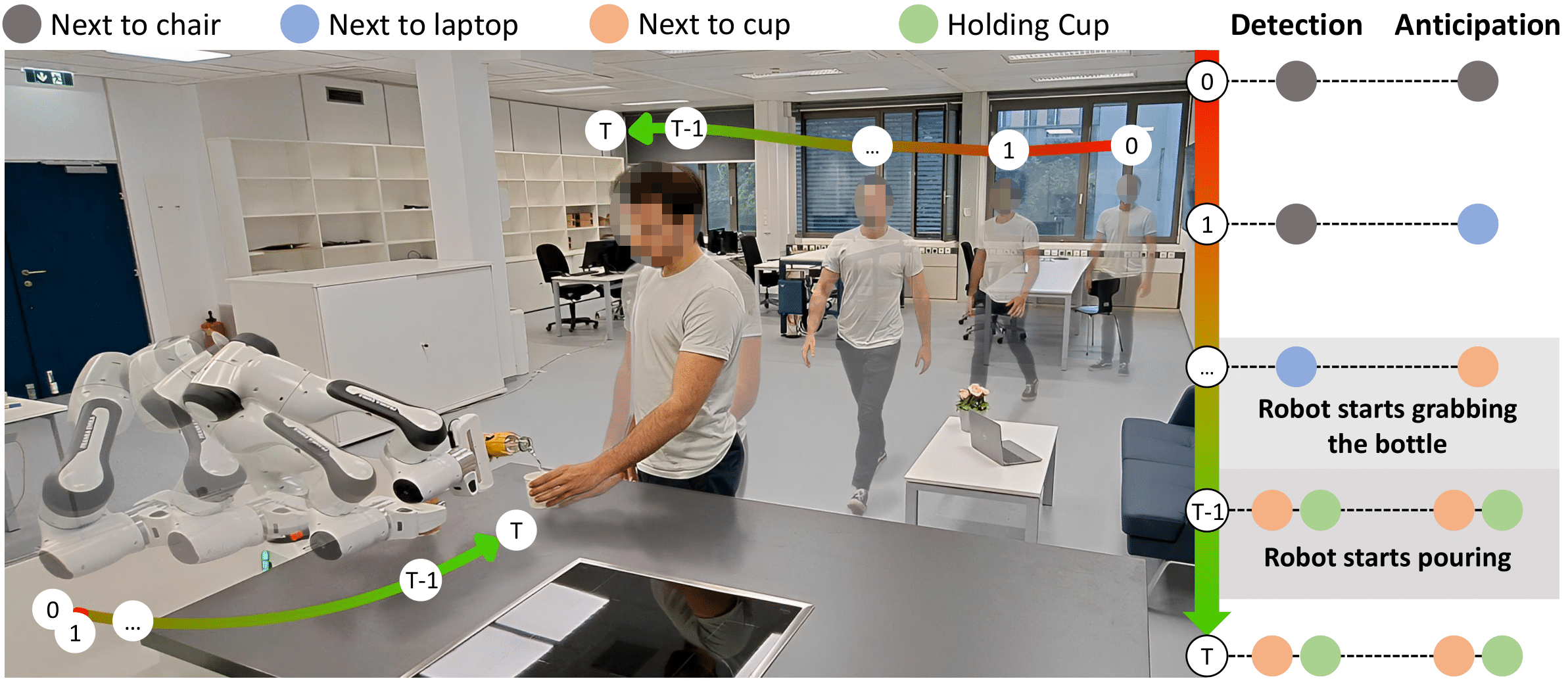
- Sep 2023: HOI4ABOT has been accepted to CoRL 2023.
- Sep 2022: I started my Ph.D. studies under Dongheui Lee at the Autonomous Systems Lab in TU Wien!
Hello, I'm Daniel Sliwowski
I am a PhD at TU Wien advised by Prof Dongheui Lee , where I work on understanding human and robot task execution, for better autonomous robot performance and human-robot collaboration.